Target Tracking Brushless DC Motor (BLDC) gimbal system based on PID control algorithm
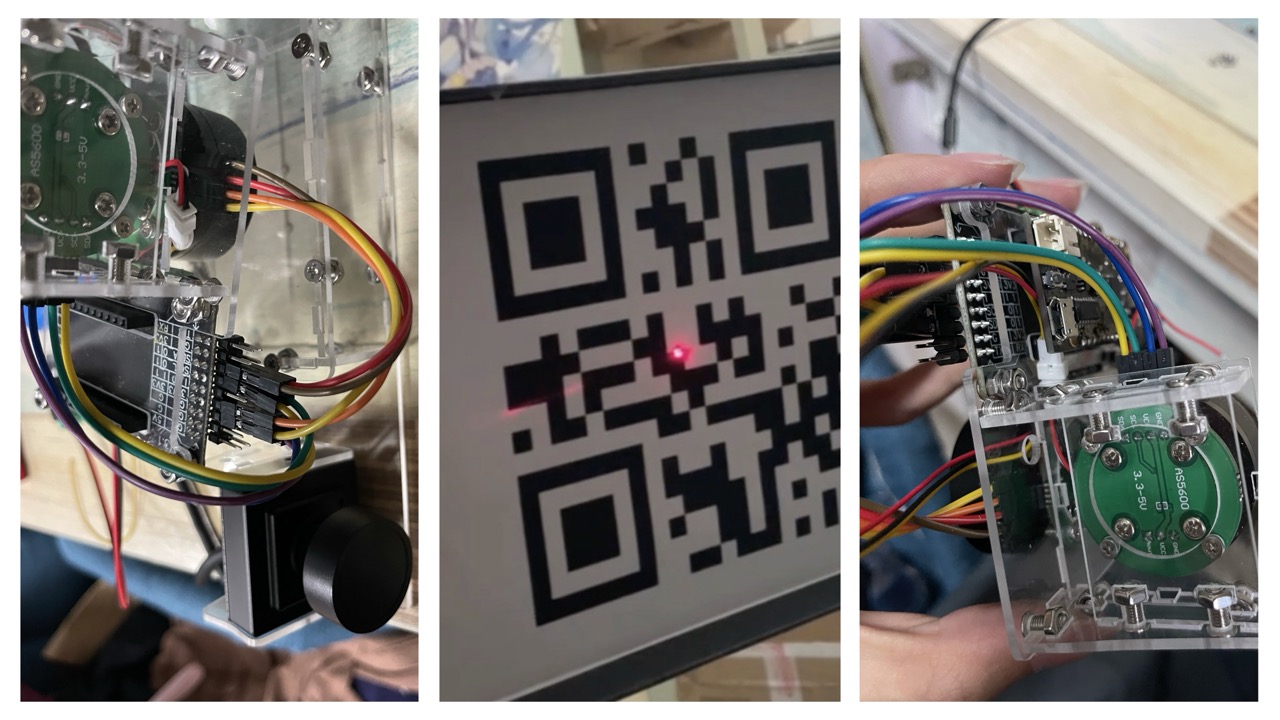
This article is still under construction. The final version will be released in the near future. AbstractThis study presents a design method for a brushless DC (BLDC) motor gimbal system that employs a proportional-integral-derivative (PID) control algorithm for target tracking. The system consists of a 2804-100kv BLDC motor, an AS5600 magnetic encoder,..
Read more